2023太原站wtt常规挑战赛比赛时间是从11月7日开始吗?
2023-10-30
更新时间:2023-09-16 10:08:36作者:无忧百科

科学家们经常从大自然中寻找设计新技术(包括机器人)的灵感。如果昆虫等生物体的特征能够在移动机器人中复制,它们可以提供一种探索危险环境、协助基础设施监控、甚至用于医疗保健的新方法。
尽管具有这种潜力,但机器人技术历来一直难以成功模仿此类生物的灵巧性和效率。在微型结构内平衡感知、运动控制和驱动与高效、低成本的能源系统阻碍了微型机器人的创新。
机器人的基本要素--执行、感知和控制--造成了能源效率低下和系统集成限制,从而阻碍了机器人能力的提高。便携式能源供应的不足也阻碍了可部署移动机器人的发展。在小规模应用中,组件微型化带来的性能损失以及微细加工和制造的局限性使这些挑战变得更加复杂。

昆虫大小的机器人由甲烷驱动,跳跃距离可达其身体长度的20倍
然而,来自康奈尔大学的Robert F. Shepherd教授研究团队介绍了一种化学动力微型致动器,可为厘米级机器人提供快速、高力致动。它利用燃烧反应释放的能量,用微小的爆炸为昆虫级机器带来了惊人的机动性和跳跃能力。这种微型昆虫机器人可以爬行、跳跃并携带超过其体重22倍的有效载荷。相关研究成果以题为“Powerful, soft combustion actuators for insect-scale robots”发表在最新一期《Science》期刊上。

【执行器的制造和操作】
作者提出了一种轻质(m=325 mg)、功率密集(Πstroke=277.2 kW kg−1)、高频微型机器人(图1),由燃烧驱动化学燃料并描述其与昆虫规模机器人的集成。该团队构建的微型机器人配有3D打印燃烧室、充气弹性膜、电极和燃油喷射管。与传统的ICE非常相似,微型机器人的运行始于将燃料(气态甲烷和氧气的混合物)传输到燃烧室(图1B)。为了发挥作用,电极通过火花点燃燃烧室中的甲烷,随后的放热反应导致产物气体膨胀,触发微型机器人的弹性膜在平均0.55毫秒内膨胀(图1C)。
该团队解释说,这种被称为“活塞式驱动”的快速膨胀可用于驱动运动或发射物体。一旦燃烧气体从燃烧室排出,就会重复该循环。据报道,这种由软燃烧驱动的微型机器人实现了140%的位移,可以在低于100赫兹的频率下运行,令人印象深刻的是,可以产生超过9.5 N的力。值得注意的是,其设计成本效益高,制造速度快,使用CLIP(连续液体界面生产)、3D打印机和树脂进行构建。
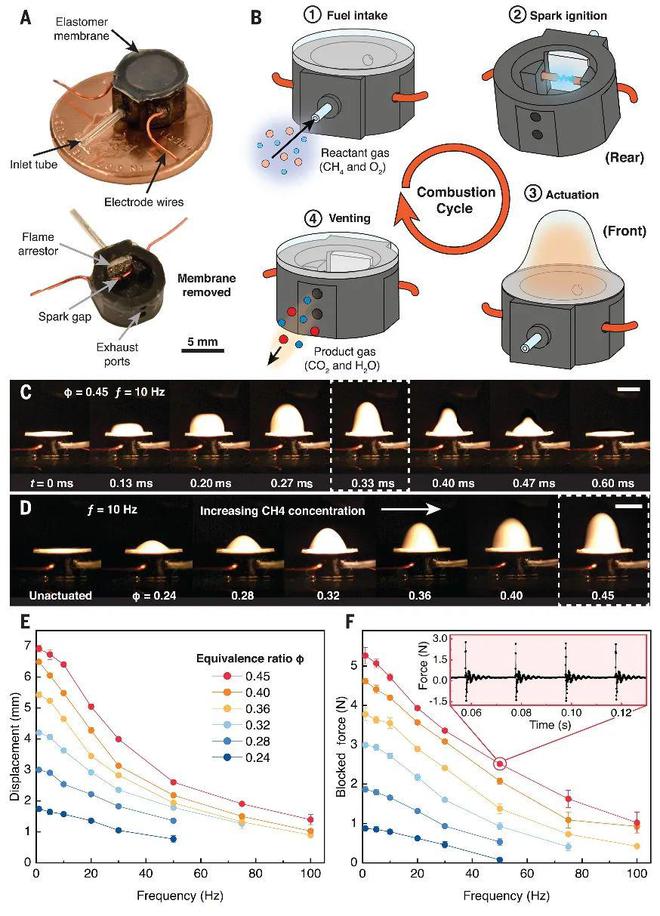
图1. 燃烧驱动微型机器人的运行和表征
进一步地,研究人员对这些过程进行了精美的建模(图2)。使用该模型,作者能够预测主要反应物和产物种类的浓度(图2B;phi=0.45,f=10Hz),以及执行器燃烧时快速增加的内部压力(图2C)。通过使用该建模数据进行计算,使作者能够对建模执行器的工作和功率输出进行预测(图2D、E)。建模数据的趋势和幅度准确地接近本文的实验结果。
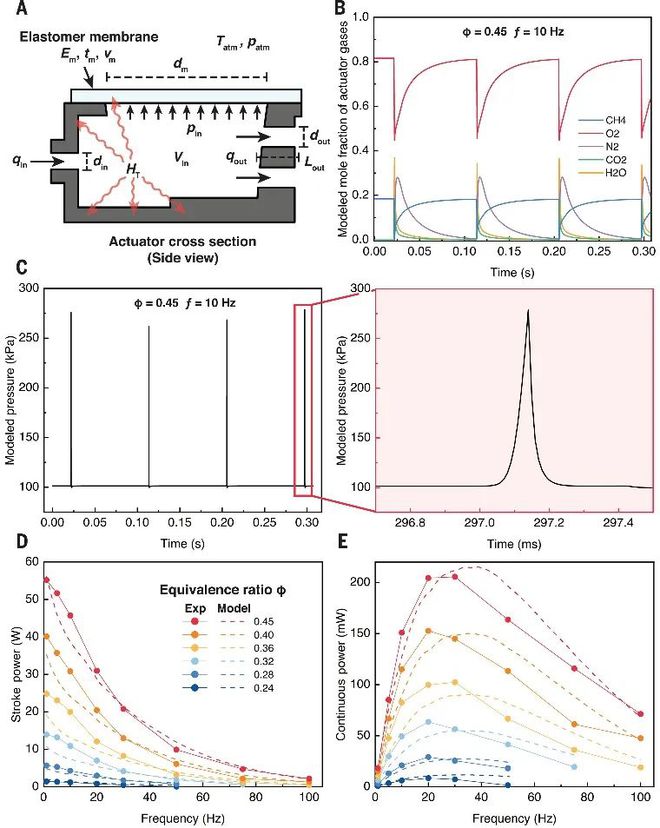
图2. 微型机器人性能模型
【集成到昆虫规模的机器人中】
为了进一步证明新执行器的有效性并证明其在微型机器人中的应用,研究人员用它为尺寸只有几厘米的四足昆虫机器人提供动力(图3)。能够驾驶并执行多种步态、跳得这么高、承受如此大的负载,远远超出了作者最初的预期。每个致动器都位于前脚和后脚的上方,能独立为四足机器人的两个脚垫充气,从而实现对定向运动的有限控制。例如,调整燃烧火花序列可实现定向转弯以及爬行和跳跃步态,速度分别为每秒5厘米和每秒17厘米。同时启动两个微型致动器可实现跳跃,最大垂直和水平跳跃距离分别为59厘米和16厘米,相当于机器人身体长度的20倍和5.5倍。
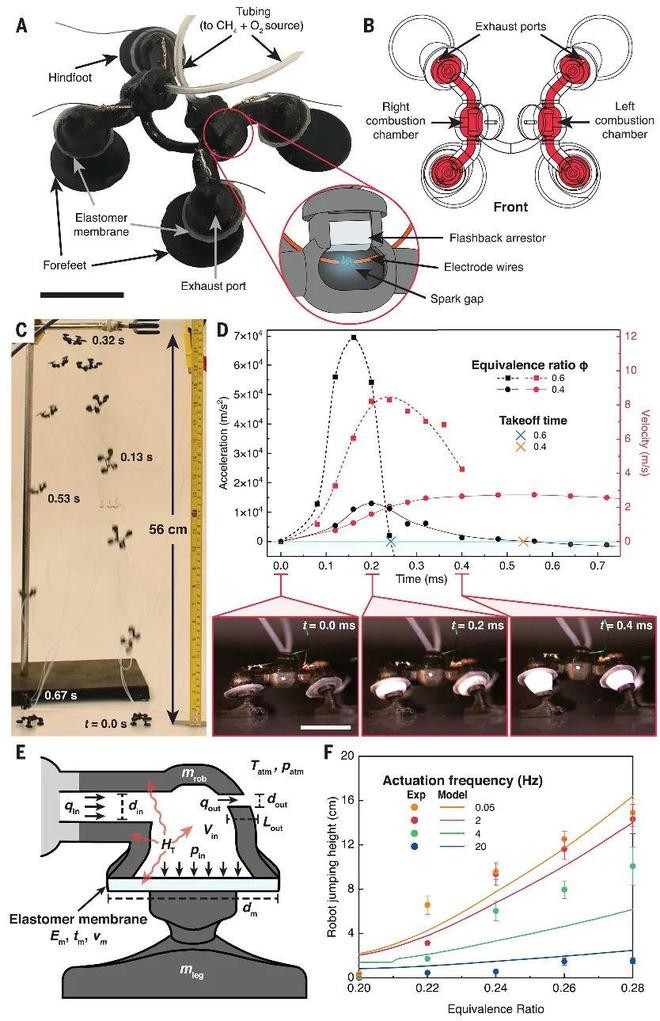
图3. 四足昆虫级机器人的跳跃性能
总体来说,与用于为昆虫规模设备提供动力的现有系统相比,本文的执行器具有多个优势:(i)使用3D打印作为主要制造策略,可以轻松扩展并与其他系统集成;(ii)柔软的驱动表面可提高设备的耐用性并以非破坏性方式与环境连接;(iii)高致动速度、力、位移和频率的组合导致高功率密度。当集成到四足机器人中时,执行器可以实现多模式运动和避障。
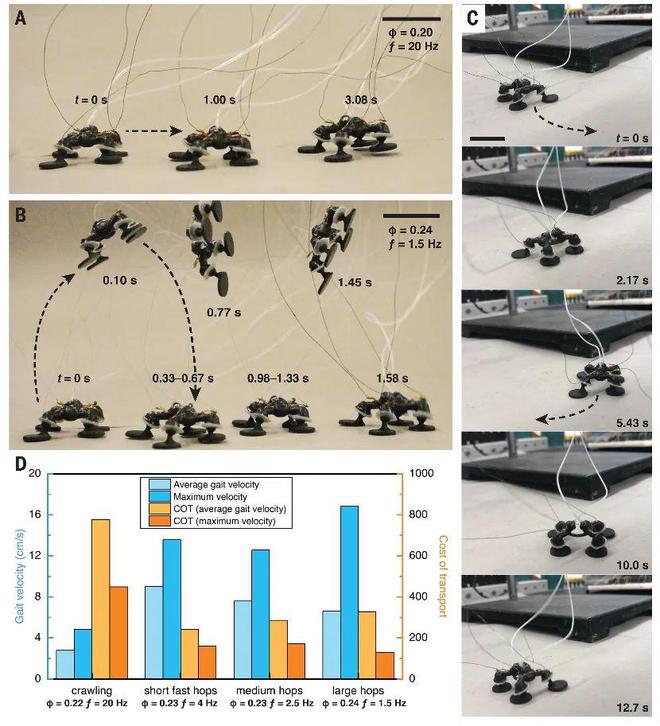
图4. 机器人多步态功能的表征
【意义与挑战】
本文的微型机器人也提出了新的考虑和挑战。除了产生必须扑灭的火焰外,该执行器目前还被拴在笨重的非板载辅助部件上。执行器需要从气缸输送的可燃气体,并且高压火花电极有自己的板外电源和控制硬件。同时,燃料供应速率、反应物化学计量、火花速率和排气速率之间的仔细的系统级平衡是必要的,这需要针对每个特定的机器人设计进行定制调整。设想的不受束缚的系统也可能对环境温度和其他环境条件敏感。此外,使用液体燃料并不能完全解决无绳索的挑战。驱动所需的高压火花仍然需要电池或其他机载电源。
随着化学动力移动机器人的不断进步,材料创新对于在长时间运行中实现不受束缚的自主性能至关重要。其中包括多功能机器人材料的设计和制造以及在整个机器人身体中嵌入能源供应的策略。本文的微型机器人的一个关键优势:是它们的电子控制能力。这保持了它们与微电子控制器和传感硬件的兼容性,用于开发智能移动机器人行为。这一研究领域的持续工作甚至可能需要结合灵感本身的来源——用于生物混合设计的活生物系统,使机器人能够直接利用自然的效率。
来源:高分子科学前沿
声明:仅代表作者个人观点,作者水平有限,如有不科学之处,请在下方留言指正!